Quark 2016 – A Cosmic Odyssey Days of festival: 5th, 6th & 7th February 2016 I participated in Line Following, Roborace and, for the first time, Open Showcase! RoboRace Objective: Design & build a remote controlled all-terrain racer that can traverse any given path with obstacles like rocks, sand, slopes, uneven
Read more
Techfest 2015 – IIT Bombay
Techfest 2015! IIT Bombay’s most awaited techfest was held last month from 26th to 28th December. I participated in Maze Runner, a competition which was part of an event called Technovoltz. The participants had to build an autonomous robot which could follow a white line and keep track of directions while traversing the maze. The
Read more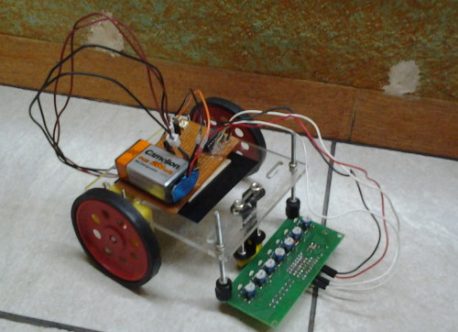
LFR “Microcontroler-less!” Mini
Who said robots need a microcontroller to be smart? This robot certainly doesn’t believe that! Presenting: LFR Mini! A line follower of the non-programmable kind! Since LFR Mini has no formal “brain”, it depends almost entirely on the digital line sensor to do the job. However, as you may know, a line sensor works on
Read more
Sataklela: a Line Following Robot
This post is all about a line following robot built by my friend and I, called “sataklela” (which means “crazy” in Marathi) because the silly thing would spin around chasing it’s tail if the program was bugged… which was quite often. This robot can follow almost any black line on a white background. (We used
Read more