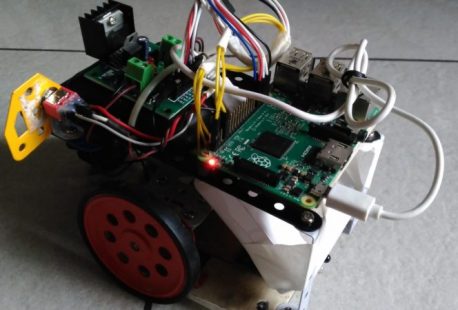
For the first time, I’ve built a fully functional robot with my trusty Raspberry Pi 2. My last attempt at connecting a motor driver to a Pi resulted in a burnt pi; but that was because I connected its 5v output to the driver’s 5v output pin (recipe for disaster). Rexplorer is
Read more