Challenger is an IR remote controlled, mobile robotic arm. It has excellent maneuverability since it is a 4 wheel drive, and all wheels have rubber tread. The arm can hold up to 250 grams of weight.
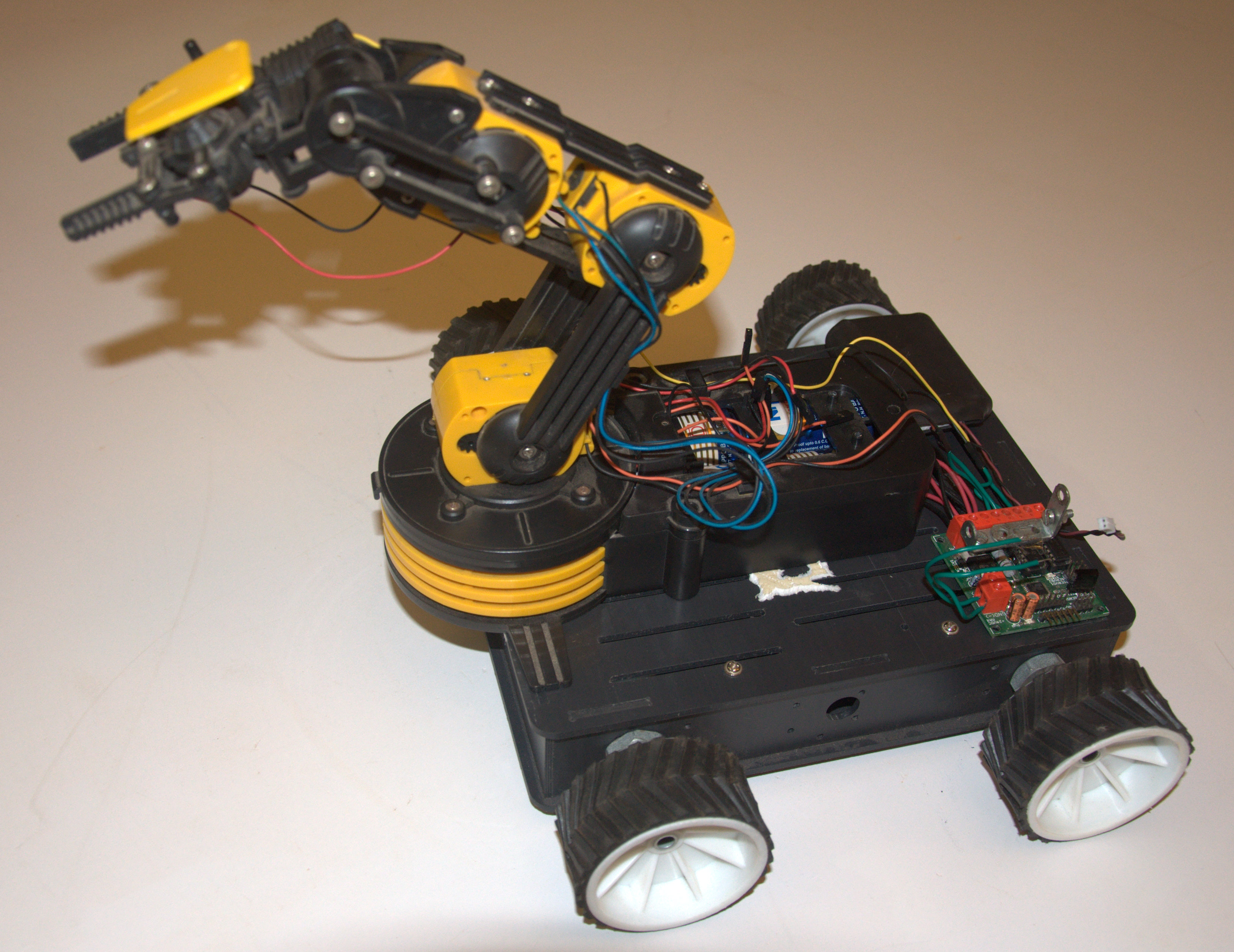
Here’s a peek into what went into the making of this robot:
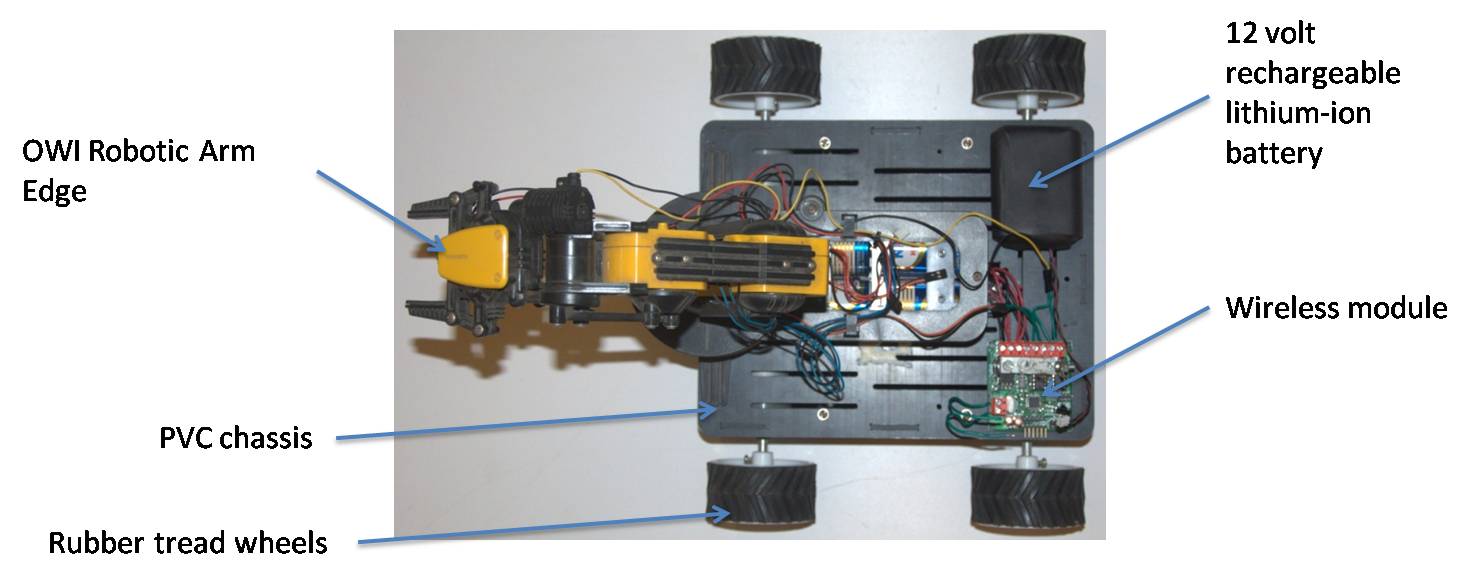
- Black color PVC chassis
- 500 rpm geared DC motors (4)
- Rubber tread wheels (4)
- 12 volt rechargeable lithium-ion battery
- IR transmitter & receiver module (Robokits India)
- OWI Robotic Arm Edge
Connections from the wireless module to the arm were done as shown below:
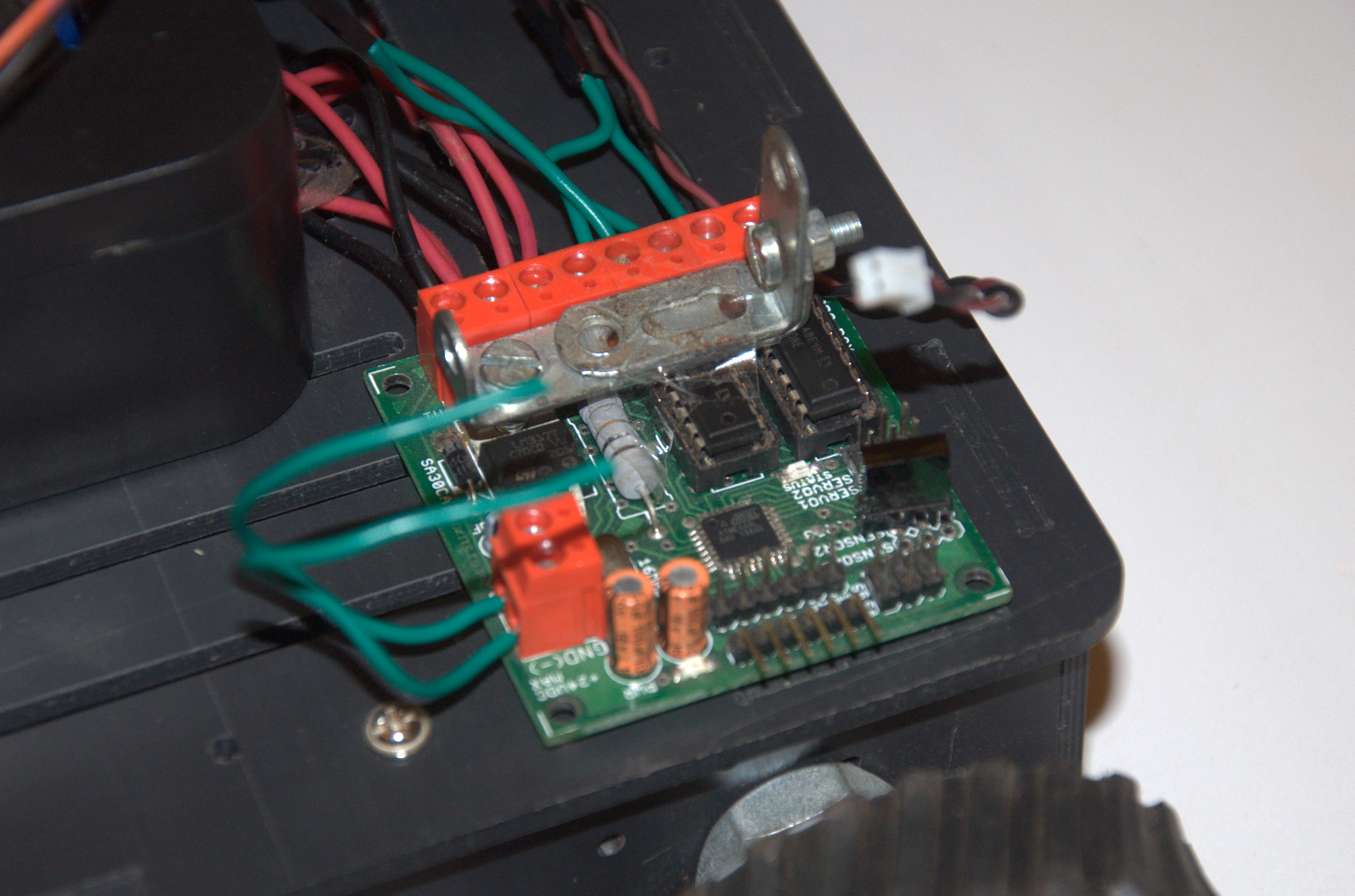
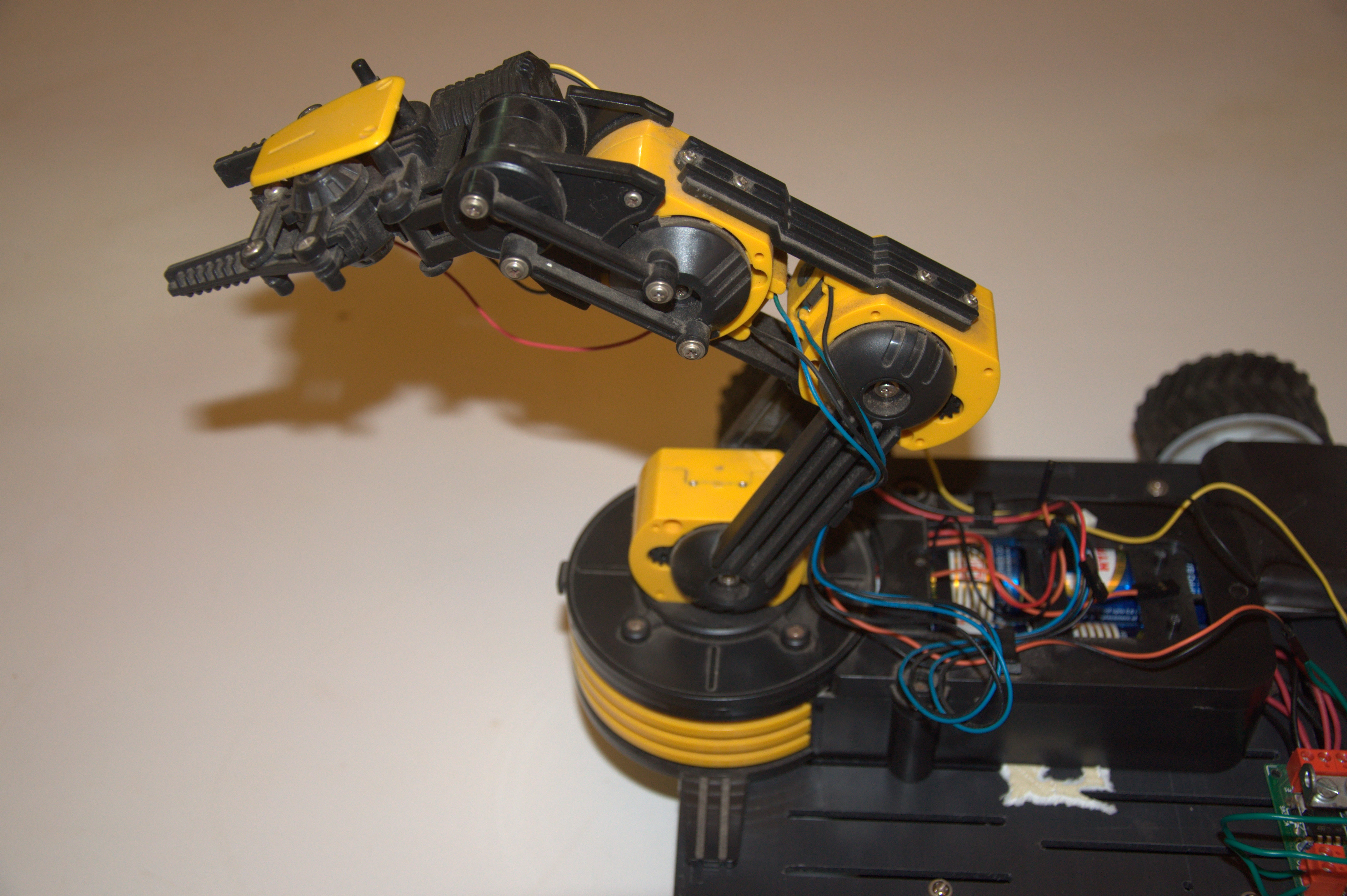
Even though there are 5 motors in the OWI Robotic Arm Edge, only M1 and M4 (gripper and base motion) have been used for this robot (The other 3 arm motors have not been connected.) These two motors have been connected to M4 and M3, respectively, of the wireless module. M1 and M2, of the wireless module, have been connected to the 4 main motors which help the robot move.
Click on the image below for details:
Watch the Challenger in action:
Challenger was also featured in a newspaper article by Herald Cafe:
